Posisi suatu titik biasanya dinyatakan dengan koordinat (dua dimensi atau tiga dimensi) yang mengacu pada suatu sistem koordinat tertentu. Sistem koordinat itu sendiri didefinisikan dengan menspesifikasi tiga parameter berikut, yaitu :
1. Lokasi titik nol dari sistem koordinat
2. Orientasi dari sumbu-sumbu koordinat, dan
3. Besaran (kartesian, curvalinier) yang digunakan untuk mendefinisikan posisi suatu titik dalam sistem koordinat tersebut.
1. Lokasi titik nol dari sistem koordinat
2. Orientasi dari sumbu-sumbu koordinat, dan
3. Besaran (kartesian, curvalinier) yang digunakan untuk mendefinisikan posisi suatu titik dalam sistem koordinat tersebut.
Setiap parameter dari sistem koordinat tertentu dapat dispesifikasikan lebih lanjut, dan berdasarkan pada spesifikasi parameter yang digunakan maka dikenal beberapa jenis sistem koordinat (Abidin,2006).
Dalam penentuan posisi suatu titik di permukaan bumi, titik nol dari sistem koordinat yang digunakan dapat berlokasi di titik pusat massa bumi (Sistem Koordinat Geosentrik), maupun di salah satu titik di permukaan bumi (Sistem Koordinat Toposentrik). Sistem koordinat geosentrik banyak digunakan dalam metode-metode penentuan posisi ekstra-terestris yang manggunakan satelit dan benda-benda langit lainnya, dan sistem koordinat toposentrik banyak digunakan oleh metode-metode penentuan posisi terestris.
Dalam penentuan posisi suatu titik di permukaan bumi, titik nol dari sistem koordinat yang digunakan dapat berlokasi di titik pusat massa bumi (Sistem Koordinat Geosentrik), maupun di salah satu titik di permukaan bumi (Sistem Koordinat Toposentrik). Sistem koordinat geosentrik banyak digunakan dalam metode-metode penentuan posisi ekstra-terestris yang manggunakan satelit dan benda-benda langit lainnya, dan sistem koordinat toposentrik banyak digunakan oleh metode-metode penentuan posisi terestris.
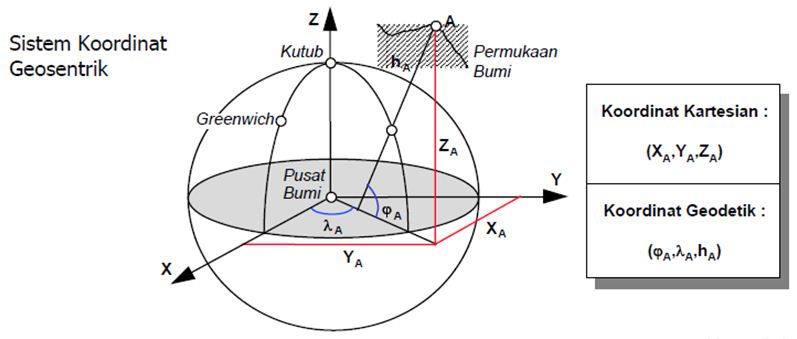
(Sumber : Hasanuddin Z. Abidin, 1997)
Sistem Koordinat Global Geodetik
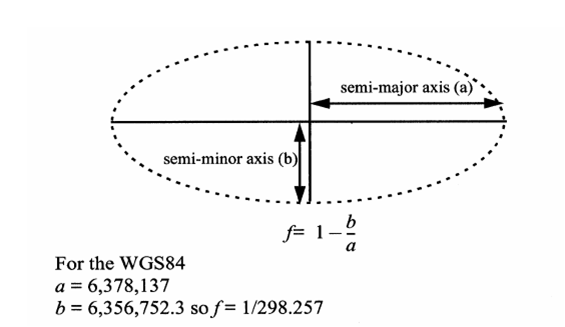
Sistem koordinat ini mengacu pada permukaan suatu bentuk ellipsoida tertentu dan tergantung juga pada ukuran, bentuk dan orientasi tiga dimensi ellipsoida. Dalam sistem koordinat geodetik, model permukaan bumi didekati dengan model ellipsoida sebagai model permukaan referensi. Posisi suatu titik pada sistem koordinat geodetik ditentukan oleh lintang geodetik (L), bujur geodetik (B) dan tinggi di atas permukaan ellipsoida (h), seperti dijelaskan sebagai berikut :
Sistem koordinat ini mengacu pada permukaan suatu bentuk ellipsoida tertentu dan tergantung juga pada ukuran, bentuk dan orientasi tiga dimensi ellipsoida. Dalam sistem koordinat geodetik, model permukaan bumi didekati dengan model ellipsoida sebagai model permukaan referensi. Posisi suatu titik pada sistem koordinat geodetik ditentukan oleh lintang geodetik (L), bujur geodetik (B) dan tinggi di atas permukaan ellipsoida (h), seperti dijelaskan sebagai berikut :
- Lintang geodetik (L) dari suatu titik adalah sudut lancip yang dibentuk oleh normal ellipsoida yang melalui titik tersebut dengan bidang ekuator (-900≤L≤+900).
- Bujur geodetik (B) adalah sudut yang dibentuk antara meredian lokal dengan meredian referensi, yaitu meredian Greenwich (00≤B≤1800E dan -1800W≤B≤00 ).
- Tinggi suatu titik di atas ellipsoida (h) dihitung sepanjang normal ellipsoida yang melalui titik tersebut.
- Bujur geodetik (B) adalah sudut yang dibentuk antara meredian lokal dengan meredian referensi, yaitu meredian Greenwich (00≤B≤1800E dan -1800W≤B≤00 ).
- Tinggi suatu titik di atas ellipsoida (h) dihitung sepanjang normal ellipsoida yang melalui titik tersebut.
Sistem Koordinat Global Kartesian 3 Dimensi
Sistem koordinat kartesian tiga dimensi terdiri dari tiga sumbu pada arah X, Y, dan Z.
Pada sistem koordinat kartesian tiga dimensi, posisi suatu titik ditentukan oleh harga X, Y, dan Z dengan ketentuan sebagai berikut :
- Titik pusat sistem koordinat kartesian tiga dimensi terletak pada pusat bumi
- Sumbu Z adalah garis dalam arah Conventional Terrestrial Pole (CTP)
- Sumbu X adalah arah perpotongan meredian Greenwich atau meredian nol CZM (Conventional Zero Meridian) yang ditetapkan oleh BIH (Burau International de l’Heure) dan bidang ekuator
- Sumbu Y adalah garis pada bidang ekuator yang tegak lurus pada sumbu X dan Z dengan mengikuti kaidah tangan kanan.
Sistem koordinat kartesian tiga dimensi terdiri dari tiga sumbu pada arah X, Y, dan Z.
Pada sistem koordinat kartesian tiga dimensi, posisi suatu titik ditentukan oleh harga X, Y, dan Z dengan ketentuan sebagai berikut :
- Titik pusat sistem koordinat kartesian tiga dimensi terletak pada pusat bumi
- Sumbu Z adalah garis dalam arah Conventional Terrestrial Pole (CTP)
- Sumbu X adalah arah perpotongan meredian Greenwich atau meredian nol CZM (Conventional Zero Meridian) yang ditetapkan oleh BIH (Burau International de l’Heure) dan bidang ekuator
- Sumbu Y adalah garis pada bidang ekuator yang tegak lurus pada sumbu X dan Z dengan mengikuti kaidah tangan kanan.

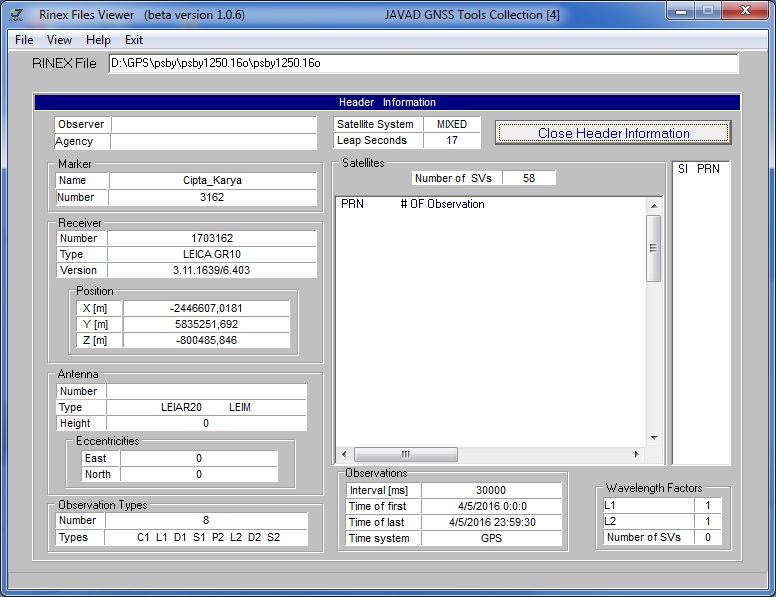
(Contoh Koordinat Geodetik dan Kartesian)
Pada posting kali ini saya coba menulis cara mengkonversi koordinat Geodetik ke Geosentrik (Kartesian) dengan ellipsoid referensi WGS 84. dan koordinat Geodetik yang akan coba kita ubah adalah patok BSBY ( 7o 12' 39,7548 LS dan 112o 43' 25,0536 BT )
1. Menghitung Manual dengan rumus Hirvonen & Moritz


2. pertama kita harus mengetahui parameter referensi ellipsoid WGS 84 disini




1. Pada koordinat longitude dan latitude titik BSBY hasil pengukuran GPS yang tampil adalah koordinat Geodetik

2. Untuk menanpilkan koordinat geosentrik adalah dengan mengubah settingan pada Job Configuration > WGS Type > WGS84 X,Y,Z

3. Maka Koordinat akan berubah menjadi Geosentrik

####SEMOGA BERMANFAAT####